نویسنده: بابی هلارد
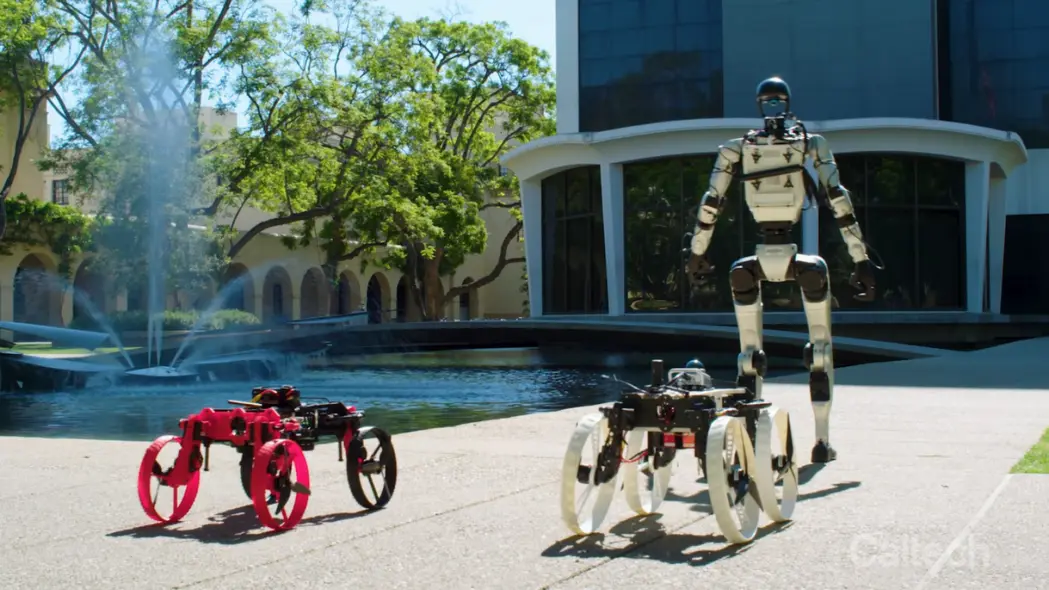
این ربات که در کالتک توسعه یافته است، یک انساننماست که میتواند پهپاد M4 را پرتاب کند و بین حالتهای مختلف حرکت تغییر حالت دهد؛ چرخهای آن قادر به تبدیل به پرهها هستند.

مهندسان کالتک سامانه رباتی چندحالتدار را توسعه دادهاند — ربات انساننما با یک پهپاد متحولکننده که از پشت خود پرتاب میشود.
پهپاد که بر پشت ربات انساننما، دستگاه Unitree G1 نصب شده است، نام آن M4 است و میتواند متحول شود — بین حالت رانندگی و پرواز جابهجا میشود. در اینجا دربارهٔ اُپتیموس پرایم یا مِگاترون صحبت نمیکنیم؛ بلکه رباتی که پهپاد را بیرون میدهد شبیه به ساوندویو است، یک دسیپتیکونی که انواع مختلف مینی‑ترانسفورمرها، مانند پهپادها، را در سینهاش نگهداری میکرد.
این سامانه نتایج همکاری سهساله بین مرکز سامانهها و فناوریهای خودمختار (CAST) کالتک و مؤسسه نوآوری فناوری (TII) در ابوظبی، امارات متحده عربی است.
این انساننما میتواند راه برود (اگرچه نمونههای روانتری نیز دیدهایم) و میتواند از پلهها عبور کرده و به هر مکانی که پهپاد را ارسال کرده است مسیر یابد، هرچند با سرعت کمتری.
«امروزه رباتها میتوانند پرواز کنند، میتوانند رانندگی کنند و میتوانند راه بروند. اینها در برخی سناریوها بسیار مفید هستند»، آرون ایمز، مدیر CAST و استادیار مهندسی هوافضا در کالتک، در بیانیهای گفت. «اما چگونه میتوانیم این حالتهای مختلف حرکت را در یک بسته ترکیب کنیم تا بتوانیم از مزایای همهٔ آنان بهرهمند شویم و در عین حال معایبی که هر یک دارند را کم کنیم؟»
چالش در اینجا در این بود که تیم چگونه رباتهای مختلف را به هم متصل کرد تا بتوانند یک سیستم واحد بسازند اما همچنان قابلیتهای متفاوتی ارائه دهند. پهپاد توسط تیم CAST به رهبری موری غریب ساخته شد، در حالی که ایمز و آزمایشگاه او ربات انساننما را پیکربندی کردند.

M4 قادر است بدن خود را برای چندین نوع حرکت مختلف بازآرایی کند — میتواند محیطی که قصد ورود به آن را دارد ارزیابی کرده و بهطور خودکار مؤثرترین ترکیبهای حرکتی را برای مانور انتخاب نماید. M4 میتواند با چهار چرخ بچرخد، چرخهای خود را به پره تبدیل کرده و پرواز کند، بر روی دو چرخ بایستد، با استفاده از چرخها همانند پاها راه برود، از دو پره برای کمک به صعود شیبهای تند بر روی دو چرخ استفاده کند و همچنین بهسادگی به سمت مقصد خود میغلتد.
قابلیت M4 برای بازآرایی اندامهای خود بهعنوان چرخ، پا یا موتورهای پیشران یک ویژگی کلیدی است. هنگامی که M4 نیاز به پرواز دارد، تمام چهار چرخ جمع میشوند و پروانهها ربات را از زمین بلند میکنند — یا از پشت ربات انساننما که هنگام پرتاب M4 بهجهت جلو خم میشود.
هدف کلی این همکاری، ایمنتر و قابلاعتمادتر کردن چنین سیستمهای خودمختار است. اگر میخواهیم رباتها اطراف ما حضور داشته باشند، آرون ایمز پیشنهاد داد که باید بیشتر بر روی افزایش قابلیت اطمینان آنها کار کنیم.
«ما به کنترلهای بحرانی ایمنی میاندیشیم، اطمینان میدهیم که میتوانیم به سامانههایمان اعتماد کنیم و آنها را ایمن نگه داریم»، ایمز در بیانیهای گفت. «پروژههای متعددی داریم که فراتر از این پروژه هستند و به مطالعهٔ تمام جنبههای مختلف خودمختاری میپردازند و این مشکلات از مقیاس بزرگی برخوردارند. با داشتن این پروژهها و جنبههای مختلف همکاریمان، میتوانیم به این چالشهای بزرگتر بپردازیم و خودمختاری را بهصورت قابلتوجه و هماهنگ پیش ببریم.»